■マイクロマウスの吸引技術について vacuum technology 1
| Introduction |
| 近年、国内外いろいろな方からマイクロマウスの吸引について教えてほしいという依頼があり、車輪移動ロボットの限界に挑むということで最近はニーズも高まってきたのは事実です。私自身もまだ不勉強な部分も多く、発展段階の技術ですが、マイクロマウスは皆で考えて技術を高め合っていくという側面もあるので私が持っている基本情報を公開したいと思います。 あくまで趣味なので、学問的にまちがいはあるかもしれませんのでご了承ください。 |
| What's the purpose of vacuum technology ? |
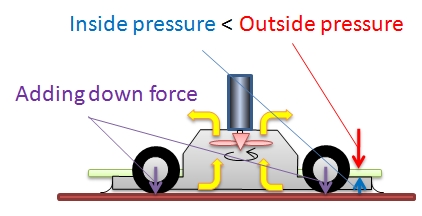
| 吸引技術とは下図1に示す通り、ロボットにファン等を搭載し、機体の底部の空気を吸い出すことで外気とロボット内部との圧力差を生み出すものである。これにより、タイヤを路面に自重以上の力で押しつけることでグリップの向上をはかろうとすることが狙いである。また、吸引する面積が大きくなるほど押し付ける力は増加する。荷重が理想とすると タイヤ1つにかかる力 = (吸引面積×圧力の差分)/N N:タイヤ数 一般にはこの力は「強制ダウンフォース」と言われる。 |
| The history of vacuum robots |
■起源 私の知る限り、この吸引技術が車両で公式で最初に使われたのは「Fan Car」と呼ばれた1970年のCan-Amに登場したChaparral 2Jというレーシングカーで、この機体は吸引ファン駆動に別エンジンを搭載したり、機体底部にシールがあったりと、本格的なものだったようです。 その後F1では1978年のスウェーデングランプリに登場したBrabham BT46Bに吸引機構が採用され、こちらは当時ライバル技術のグランドエフェクトカーにも圧勝したが、その後、機体後部のファンがゴミを撒き散らして危険ということで即禁止されてしまった。 このように、レースの世界では強制ダウンフォースの考え自体は今から40年以上も前に存在している。 ■国内他のロボット競技 一 方日本国内のロボット競技では「相撲ロボット」は早い段階から吸引機構を搭載している。この競技の場合タイヤのグリップアップよりも、相手にひっくりかえされないことを目的としていた側面が強いと推測される。ただ最近は単純に磁石による吸着方式に代わってきたようである。 グリップを上げる目的で吸引機構を最初に搭載したと思われるのは2002年ランサー、2003年のマイコンカーラリー優勝の丸木氏が製作された「青嵐」という機体である。一部パラメータが公開されているが、当時としては驚異的な値である。私の吸引への憧れの原点はこの機体であった。 その後、2000年代後半にはこのロボットランサー、さらにロボトレースで吸引機構は広く普及するようになったが、ロボトレースでは2007年を最後に吸引機構は禁止された。 ■マイクロマウス競技における吸引 私が把握しているのは2005年頃からなので、それ以前のことは詳しくないのでもしかしたら間違いかもしれないが、マイクロマウスの吸引機構搭載のさきがけとなったのはアメリカMITのDavid Otten氏、日本では米氏(2003〜2010)の2方と思われる。 
David otten氏 2007年大会 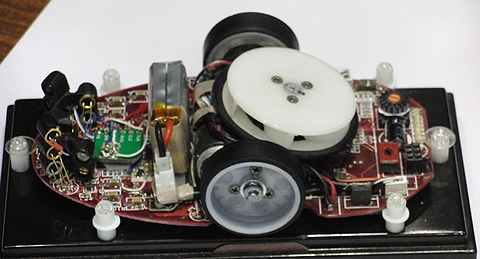 米氏 2010年大会 Otten氏のマウスはスカート機構は無く、ファンも送風用の軸流ファンでシンプルな構成で吸引力は弱めとみられるが、それでも吸引有のときは無よりもタイムがよかった記憶があるので効果があったとみられる。一方米氏のマウスはスカート付きでファンのマウントも複雑な加工部品によって構成されており、1つ1つのメカの完成度が職人技といえるほど高かった。吸引力もかなりのもので自重の2倍以上の威力があったらしい。 動画は2010年の中部地区大会 momoco09 全ターンが桁違いに速く、当時自分を含めて誰も歯が立たなかったことを鮮明に覚えている。おそらく2014年の私の機体でもターンに関しては勝てないと思う。しかし全日本では、2009,2010と探索に失敗して一度も最短走行ができなかった悲運の機体である。 私が吸引機構を始めたのは、マイクロマウス5年目の2010年でちょうど米氏と入れ替わる形となったのである。 |
→続く(next)