■マイクロマウスの吸引技術について vacuum technology 2
| Vacuum Fan selection |
| 吸引に適したファンはどのようなものかについて説明します。1でも述べたが、吸引はロボット内の気圧を低下させることにより生じた外気圧との差分と吸引する面積の積が力としてタイヤに加わることに意味がある。 吸引力 = (吸引面積×圧力の差分) したがってファンに求められる性能はこのロボット内の気圧をいかに効率よく下げることができるかということになる。 私は流体力学の専門家ではないので、詳しいことはわかりませんがファンの性能は下図のようなP-Q曲線というもので定義されるようです。 |
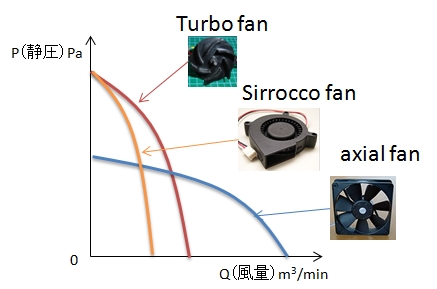
| Pは、静圧でありファンの吸気側(内部)と排出側(外気)の気圧差 Qは、単位時間内にファンが排出する空気の量を示す。 このときPがゼロのときは圧力差がないとき=送風&回転抵抗が最大になる。 また、Qがゼロのときは空気の流出がない=最大の負圧となる。 (ちなみに、掃除機で口をふさぐとモータの音が変わるのは空気の流入が無くなり、モータへの負荷が少なくなって回転数が上がるためである) また、ファンの回転数を上げるとP,Qとも絶対値が大きくなる(曲線が外に膨れる)。 そして吸引中に空気が漏れるとQ軸の右方向にずれていくということである。 グラフのように、ターボファンやシロッコファンは、風量が少なく高い静圧を得られるが、軸流ファンは風量が多い割に大きな静圧は得られない傾向にある。このことから吸引に用いるファンの種類はターボファンかシロッコファンが実用的と言える。 因みにシロッコファンは騒音が小さいかわりに効率がターボファンより悪いというレポートがあるので、消去法でいくとターボファンが適しているという結論になる。ファンの騒音はマイクロマウスではむしろかっこいいのであったほうがいいですよね? |
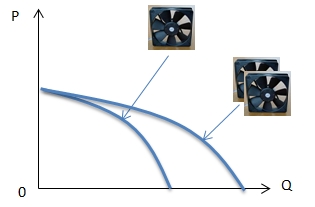
| 駄足ですが、吸引力を上げるためにファンの数を増やすという考えがありますが、ファンの数を増やしても風量Qは増えるが、得られる静圧は大して変わらないようです。ファンの数が必要なのは、吸引する面積が大きい場合です。ただし垂直方向に2つのファンを重ねる場合は静圧も向上するかもしれません。 マイクロマウス程度の小型のロボットはファンの数を増やすとアクチュエータが増加してかえって重量、消費電流とも増加するのでそれよりは後述のファンの形状で対策するほうが現実的と思われます。(ただしタンデムローターでカウンタートルクを打ち消すためにあえて複数搭載するという考えもあります) |
| What's the shape of turbofan? |
|
Q.ファンの大きさ、高さ、速度の関係 という関係があり ファン側で吸引力を大きくするにはこのQを大きくすればいいはずである。 |
| How to select fan motor? |
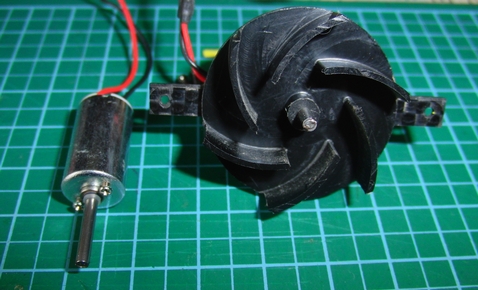
| 吸引用ファンのモータは、以下の点に注意して選択する。 ・高回転型であるか? ファンの回転速度が要求されるので、低い電圧で高速に回転するタイプが 向いている。ファンを回す用途では最近、小型のラジコンヘリが流行しているのでそこから選んでみるといいかもしれない。 ・電流に余裕があるか? 極端に高回転の型を選ぶと、電流を根こそぎ吸い取られて、肝心の車輪駆動モータへの電流が足りなくなってしまう事態となる。なのでバッテリーの放電容量は普通の機体よりも十分に確保する工夫が必要となる。 ・軸の芯出しは適切か? モータのシャフトにファンを直結することになると思いますがここの芯出しが悪いとファンがすりこぎ運動をおこして、無駄な方向に力が発生して機体が振動してしまう。したがってファンの高さに対してシャフトが短いモータは精度が厳しくなる。 |
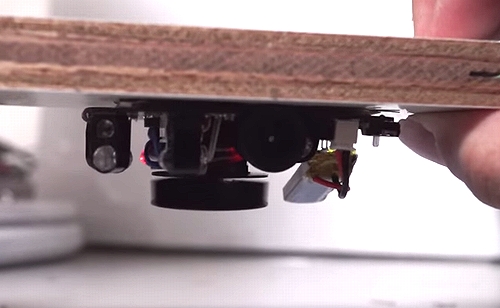
| Actual fan 「紫電改」 |
参考までに私の2012年マシンの吸引機構は以下のようなスペックです。
|
Motor |
namiki SCL10-1806(Φ10 7.7g 0.36w 3V 5.7Ω) ※junk parts shop \100 |
|
Voltage |
6〜7V PWM duty 60%〜80%(バッテリー残量による) |
|
Speed |
about 28000rpm |
|
Current |
sorry no data. (estimate 2.4A) |
| Fan | R:30mm H:6mm fin:6 Thickness:1mm Material :POM (CNC cut) |
| Force | about 125g |
回転数計測の様子
非常にラフな方法だが1000fpsでファンにつけたマーカーの角度を目分量で計測
| Actual skirt 「紫電改」 |

全体図
| スカートは、ほとんど米さんの2010年モデルと同じような構成の2重スカートです。 1次はポリカーボネイトのガイド、2次はビニール系の樹脂で構成。隠すつもりは全くありませんが、ビニールは窓の隙間風防止用の製品で5年以上前の販売で現在はもう入手できないと思います。 ここはノウハウにあたる部分なので説明が難しいですがポイントとしては ・探索中はできるだけ接地しないようにする。 ・少し吸引すればスカートが可動して密閉状態が作れる ・走行方向の摩擦を少なくする。 といったところです。 |
| Notices |
| 最後に注意点をまとめます。 ・吸引をすればそれだけで加速・減速がよくなるは少し違います。 いくらグリップがよくなってもタイヤに正しく荷重がかかっていなければ全然意味がありません。吸引無しでもともと荷重が不安定な機体は吸引するとそのバランスの悪さがさらに増幅されて不安定になります。私もメカ設計は苦手なので大きいことは言えませんが、吸引する場合はより慎重な設計を行うことを心がけてください。 ・パラメータの調整は至難の業となることを覚悟してください。 私が吸引無の機体から吸引に移行したとき、吸引無の機体はほとんど理論通りに調整できましたが、吸引すると強制ダウンフォースという非線形要素が加わります。非線形といっているのは路面の状態や段差、空気漏れなどで不規則に変化するということです。調整方法はあえて言いません(というか正解はないと思っています)様々なデータを解析してパラメータを最適に調教するしかないと思っています。 |
最後までありがとうございます。
少しでも吸引技術の知見が増えれば幸いです。