��13. �}�C�N���}�E�X�@"���d��"�̏Љ�
|
�@S pec |
|
Size |
Width:76mm�@ Length: 115mm �@Height: 35mm |
|
Weight |
��126g |
|
Power
Supply |
HYPERION 25C:LiPo (120[mAh]) 3cell 11.1V�@ |
|
Control |
���ֈ�̑��xPI�}�p���xPI |
|
Motors |
1717T006SR+IE2-512
�~2�@�i���s) |
|
�c���������� |
TB6612FNG(���s),ZXMN2F34FH(�z��,LED) |
|
CPU |
SH7137F 80MHz with 256k EEPROM |
| Gyro | ADXRS610 ���W���[��(BestTechnology�� (�p��)) |
|
Wall
Sensors |
TPS601A & SFH4550�~8 |
|
Wheels |
POM Diameter:24.5mm
Width:8mm�@�������x�A�����O |
|
Maze solve
algorithm |
�S�ʒT���@�i�ŒZ�o�H�F���ԃx�[�X�]��������) |
|
Speeds |
Straight:�`3.2m/s
(2013) ���@5.2m/s (2016) |
| �@Introduction |
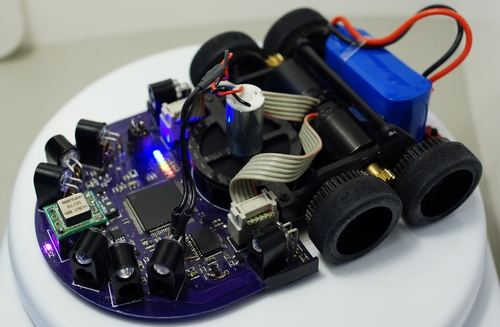
| 2012�N�̃}�E�X�u���d�v�̉��ǔłł���B��H�͂��̂܂܂ł��邪�A���J�n�A�\�t�g�n�Ƀ}�C�i�[�`�F���W�����{�����B �\�t�g�͌����f�����d���琧��ƌ��Z���T�ɂ����3�N�����ĉ��ǂ��A2012,2013�N�ƑS���{�ł͌��ʂ��o�Ȃ��������A2014�N�ɂ͒n����͑S��5���������A�����đS���{�ł悤�₭�D�����ʂ����u�z���}�E�X�͑���Ȃ��v�Ƃ����W���N�X��ł��j�����B 2014�N�O���ɂ͐V��u���e�v�ɂ������\�͔����ꂽ���A���e�̃\�t�g���C������ߒ��ł�����ɂ��C���������A������ʂœ��ɒ��i�̐��\�����サ���B�����p�����[�^��100���� 5�N�Ԃ̉^�p�ōŒZ���s�������������ł�16�N�x�V��́u�Ԃ��a���v�������ă^�C�����ꂽ���Ƃ͂Ȃ������B |
| �@Competition Results |
| �� | �L�^ | ���� |
| 2013 ���n���� | �}�E�X���Z : 4�b817 | 1�� |
| 2013 �����{�n����� | �}�E�X���Z : 3�b667 | 1�� |
| 2013 �����n���� | �}�E�X���Z : 4�b296 | 1�� |
| 2013 �S���{���@�G�L�X�p�[�g�N���X |
�\�I :
�V�[�h |
- |
| 2014 ���̍���� | �}�E�X���Z : 3�b164 �@ | 1���@ |
| 2014 ���n�����@ | �}�E�X���Z : 3�b367 �@ | 1���@ |
| 2014 �����n�����@ | �}�E�X���Z : 3�b634 �@ | 1���@ |
| 2014 �S���{���@�G�L�X�p�[�g�N���X �@ |
�\�I : �V�[�h |
1���@ |
| 2015 ���n���� | �}�E�X���Z : 3�b901 �@�@ | 1�� |
| 2015 ���̍���� | �}�E�X���Z : 4�b121 �@�@ | 1�� |
| 2015 �����n���� | �}�E�X���Z :
3�b362 �x���T�[�L�b�g:5�b855�@�@ |
1�� 1�� |
| 2015 �S���{���@�G�L�X�p�[�g�N���X �@ | �\�I : �V�[�h ���� : |
- |
| 2016 ���n���� | �}�E�X���Z : 2�b738 �@�@�@ | 1�� |
| 2016 ���k�n���� | �}�E�X���Z : 5�b476 �@�@�@�@ | ���Q�l |
| 2016 �����n�����@ | �}�E�X���Z : 5�b986
�x���T�[�L�b�g:5�b680�@�@�@�@�@�@ |
���Q�l 1���@ |
| �@Media |
| �T�v |
| 2013 9.16 �@��p���ۃ}�C�N���}�E�X���@�o�� |
| 2013 11.8 �@���ۃ��{�b�g�W�@������ЃA�[���e�B�l�u�[�X�@�f�����s |
| 2013 12.23 �m�g�j BS-1 3:00�`�@Great Gears (��L�f���̏Љ�j |
| 2015 3.16 APEC2015 MicromouseContest �D��& Fastestrun |
| 2015 9.11 ��p���ۃ}�C�N���}�E�X��� �@�Q�� |
| 2016 9.11 �@��p���ۃ}�C�N���}�E�X��� �@�D�� |
| �@Mecanical design�@(2012����̕ύX�_ ) |
|

|
���P�O
���P��
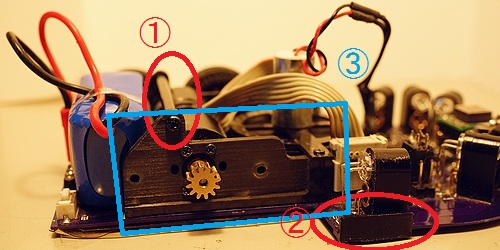
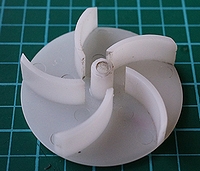
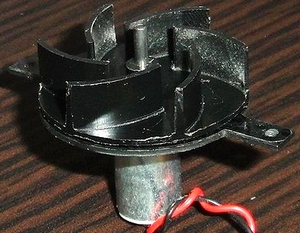
| �D�z���t�@���̕ύX �ȑO�̃t�@���͂�������̑��N���[�i�[���������̂𗬗p���Ă������S�o���������A�Ǝ��u���ɂ��U�����������Ă����B�����ō���V���ɐV�K�Ńt�@�������삵���B�ύX�_�͈ȉ��̒ʂ� �E�H���̖����̕ύX�i�T�����U���j �E�t�@���a���������� �E�H���̍������������� �S�o�������P����A�z���͂�����サ���B�܂��ڍׂȃp�����[�^��U���Ẵe�X�g�͍s���Ă��Ȃ��̂ŁA�����̌���͍���̉ۑ�B |
| �@Hardware design |
| �ύX�� |
| �@Software design |
|
|
| �@Movie |
no.data
| �@Future Studies |
|
����x�A�������� |