仭10.儅僀僋儘儅僂僗丂"Mice sweeper"偺徯夘

| 丂S pec |
|
Size |
Width:76mm丂 Length: 112mm 丂Height: 32mm |
|
Weight |
栺116乣126g乮揹抮,梡偄傞媧堷憰抲偵傛傝堎側傞乯 |
|
Power
Supply |
HYPERION 25C:LiPo (240[mAh]) 2cell 7.4V丂 |
|
Control |
椉椫堦懱懍搙PI亇妏懍搙PI |
|
Motors |
1717T006SR+IE2-512 亊2 |
|
俢倰倝倴倕倰 |
TB6612FNG |
|
CPU |
SH7137F 80MHz with 256k EEPROM |
| Gyro | ADXRS610 儌僕儏乕儖(BestTechnology惢 (攑斣)) |
|
Wall
Sensors |
TPS601A & OSR5MA5111A亊6 |
|
Wheels |
POM Diameter:24mm
Width:8mm丂椉帩偪儀傾儕儞僌 |
|
Maze solve
algorithm |
嬤偦偆側枹扵嶕嬫娫偵懌棫偭傐偄傕偺 |
|
Speeds |
Straight:2.5乣3.0m/s |
| 丂Introduction |
|
| 丂Competition Results |
| 戝夛柤 | 婰榐 | 弴埵 |
| 2010 拞晹抧嬫弶媺幰戝夛(僆乕僾儞嶲壛) | 儅僂僗嫞媄 : 4昩
157 僒乕僉僢僩嫞媄丂: 8昩 438 |
- - |
| 2010 搶擔杮抧嬫戝夛 | 儅僂僗嫞媄 : 4昩
760 僒乕僉僢僩嫞媄丂: 8昩 016 |
2埵 1埵 |
| 2010 拞晹抧嬫戝夛 | 儅僂僗嫞媄 : 9昩
689 僒乕僉僢僩嫞媄 : 8昩 237 |
6埵 3埵 |
| 2010 慡擔杮戝夛丂僄僉僗僷乕僩僋儔僗 | 梊慖
:
搶僔乕僪 寛彑 : 4昩 942 丂丂丂僯儏乕僥僋僲儘僕乕徿 |
- 4埵 |
| 丂Mecanical design |
丂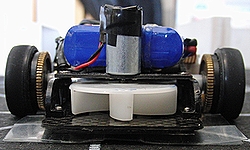 |
丂媧堷婡峔丅儌乕僞偼擔杮嫶偺僕儍儞僋壆偱廍偭偨暲栘惛枾偺兂10偺僐傾儗僗儌乕僞丅偙偺儌乕僞偼僔儍僼僩偑挿偔丄媧堷僼傽儞傪捈寢偝偣傞偨傔偵搒崌偑傛偐偭偨丅僼傽儞偼壠偵揮偑偭偰偄偨僴儞僨傿乕僋儕乕僫乕傪暘夝偟偨傕偺丅捠忢偱偁傟偽悈暯傪弌偡偨傔偺捛壛岺偑昁梫偱偁傞偑丄偙偺僼傽儞偼婏愓揑偵儌乕僞僔儍僼僩偵嵎偟崬傓偩偗偱廫暘悈暯偑弌偣偨丅 |
丂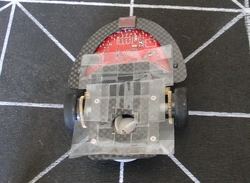 |
丂僗僇乕僩晹暘丅僔儍僔偼CFRP惢偱丄崉惈偲懴徴寕惈偵桪傟偰偄傞丅媧堷婡峔偼儘儃僢僩儔儞僒乕嫞媄偱傛偔梡偄傜傟偰偄傞曽幃傪儅僂僗偵桝擖偟偨丅壗庬椶偐偺慺嵽傪慻傒崌傢偣丄媧堷帪偺枾晻惈傪曐偪側偑傜傕妸傝傗偡偝傪弌偟丄側偍偐偮抜嵎傕忔傝墇偊傜傟傞傛偆偵偡傞偨傔偵偐側傝嬯楯偟偨丅屻傠偩偗媧堷偟偰偄傞偺偼廳怱偺僶儔儞僗傪庢傞堄枴偑偁傝丄2椫幵偺応崌丄愭抂偺僇僌僗儀乕儖偵晧壸偑偐偐偭偰偟傑偆偲媧堷偺壎宐偑敿尭偟偰偟傑偆偲峫偊偨偨傔丅 |
丂 |
丂CNC傪巊偭偨岺嶌暔丅僼傽儞傕堦搙偼帺嶌偟偨偑婛惢昳偵偼媦偽側偐偭偨丅 CNC偼BLACK嘦1510 惂屼僜僼僩偼turboCNC PC偼尦慶僱僢僩僽僢僋Libretto60 |
| 丂Hardware design |
-
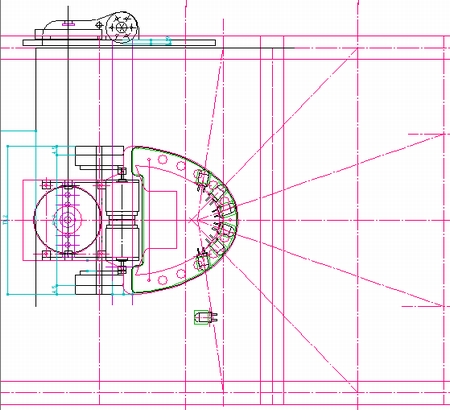
幬傔僙儞僒偼敿嬫夋埲忋慜傪尒傞偙偲偱崅懍憱峴帪偺柍棟偺側偄巔惃惂屼丄僞乕儞帪偺憗傔偺暻愗傟曗惓傪峴偆偙偲偑壜擻偵側偭偨丅
墶僙儞僒偼嫀擭偺儅僂僗摨條丄庡偵扵嶕帪偺暻愗傟曗惓丄暻撉傒偵梡偄傜傟傞丅
慜僙儞僒偼庡棳偲偼堎側傝丄崱夞慜曽偵妏搙傪偮偗偰攝抲丅偙傟偼僞乕儞慜偵2偮偺慜僙儞僒偺嵎暘傪棙梡偟偰婡懱偺柪楬偵懳偡傞妏搙傪曗惓偡傞偨傔丅楢懕僞乕儞偱偼嵗昗傛傝傕丄妏搙偑偢傟傞偙偲偺傎偆偑抳柦揑偲側傞丅幬傔憱峴帪偺曗惓傕偦傟傎偳晄帺桼偱偼側偐偭偨丅
|
|
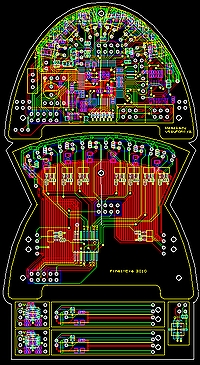
夞楬偺戝偒側曄峏揰偼岝僙儞僒丅崱傑偱丄BasicMouse曽幃偺2抜HPF+憹暆+僺乕僋儂乕儖僪傪梡偄偰偒偨偑晹昳揰悢嶍尭偺偨傔丄慡偰庢偭暐偄丄僜僼僩僂僃傾偱偺傒奜棎傪僇僢僩偡傞傛偆偵偟偨丅僄僉僗僷乕僩寛彑偺娐嫬偱傕傎偲傫偳栤戣側偐偭偨偺偱曄峏偼惉岟偲偄偊傞丅 壓偺晹暘偼僩儗乕僒梡偺暿婎斅丅偙偺儅僂僗偼壓偺婎斅傪僐僱僋僞偱愙懕偡傞偲儔僀儞僩儗乕僒偵傕側傞偲偄偆奼挘惈傪帩偭偰偄傞丅偙偺懠偵傕儔僕僐儞僒乕儃傗丄PSD側偳斈梡偺僙儞僒傪偮偗傞偙偲傕偱偒傞偺偱偦偺婥偵側傟偽儔儞僒乕傗儅僀僋儘僋儕僢僷乕偵傕曄恎偑壜擻偱偁傞丅 SH7137偼12bit偺AD億乕僩偑16屄PWM弌椡傕幚幙10埲忋偲廫暘偡偓傞傎偳偁傞偨傔丄儅僂僗偵偼彮乆僆乕僶僗儁僢僋偱偼偁傞丅 |
 |
| 丂Software design |
|
|
| 丂Movie |
媧堷偺條巕
憱峴偺條巕
| 丂Future Studies |
|
仭僶僇 尗偝偑偨傝側偄丅柪楬傪嶌傞懁偺巚偆氣丅崱屻偼抧嬫戝夛偱傕儗僀傾僂僩偑寵傜偟偔側傞壜擻惈偑偁傞偺偱丄彮偟扵嶕傗嵟抁摫弌曽朄傪尒捈偡帪婜偐傕丅 仭姷惈儌乕儊儞僩 斈梡惈傪弌偡偨傔偵掙斅儅僂僗傪掹傔偨偑丄愱梡婡偵偡傟偽寉検壔傕憡傑偭偰丄傕偆彮偟懍偔側傝偦偆側婥偑偡傞丅傕偆彮偟儅僗傊偺廤栺偑昁梫丅 |