| マイクロマウスの製作の記録を紹介しています | |||||||||||||||||||||||||||||||||||||||||||||||||||
|
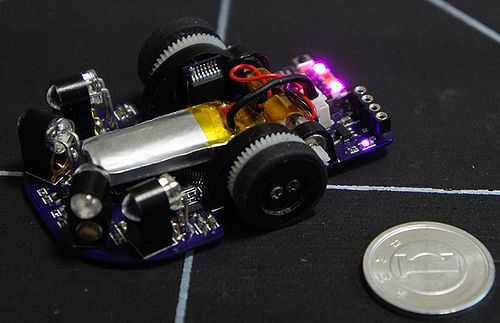
■12. ハーフサイズマイクロマウス "紫電RX"の紹介 |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
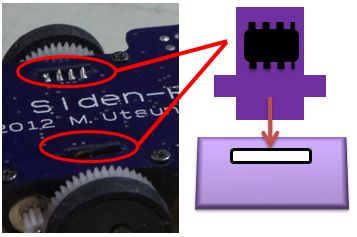
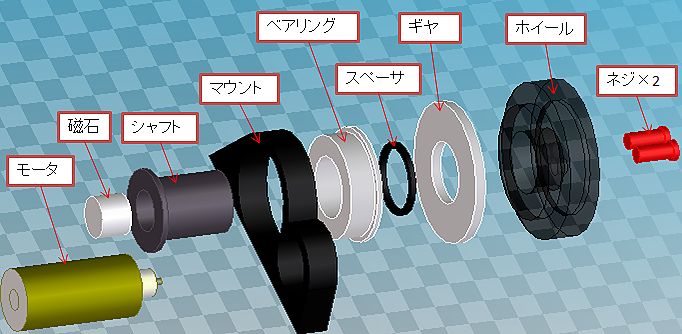
 配置図
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
| (C)1997〜 hidejr1053 all rights resereved | |||||||||||||||||||||||||||||||||||||||||||||||||||
| マイクロマウスの製作の記録を紹介しています | |||||||||||||||||||||||||||||||||||||||||||||||||||
|
■12. ハーフサイズマイクロマウス "紫電RX"の紹介 |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
配置図
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
| (C)1997〜 hidejr1053 all rights resereved | |||||||||||||||||||||||||||||||||||||||||||||||||||